Every pole, inspected from the sky.
How Punch trained and deployed a computer vision system that grades utility-pole condition from drone imagery — and routes repairs to crews in the field.

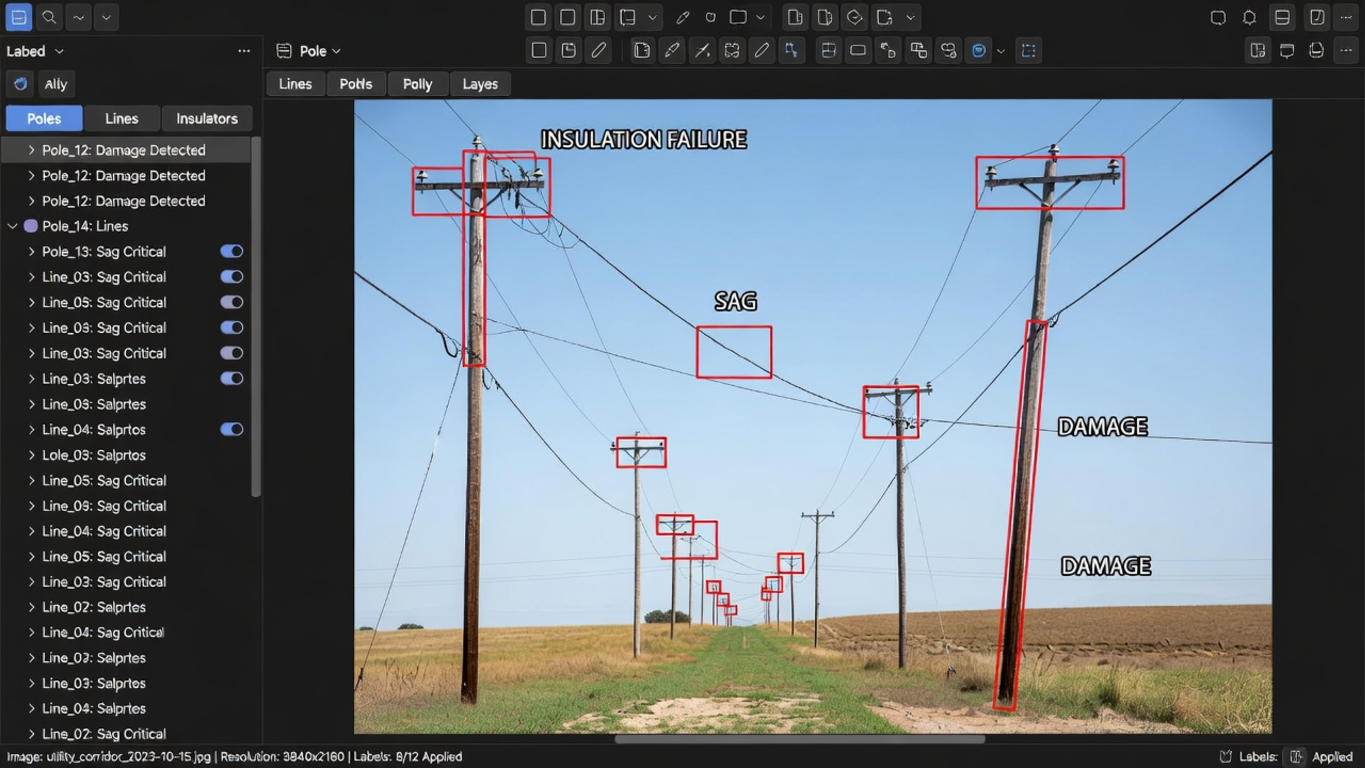
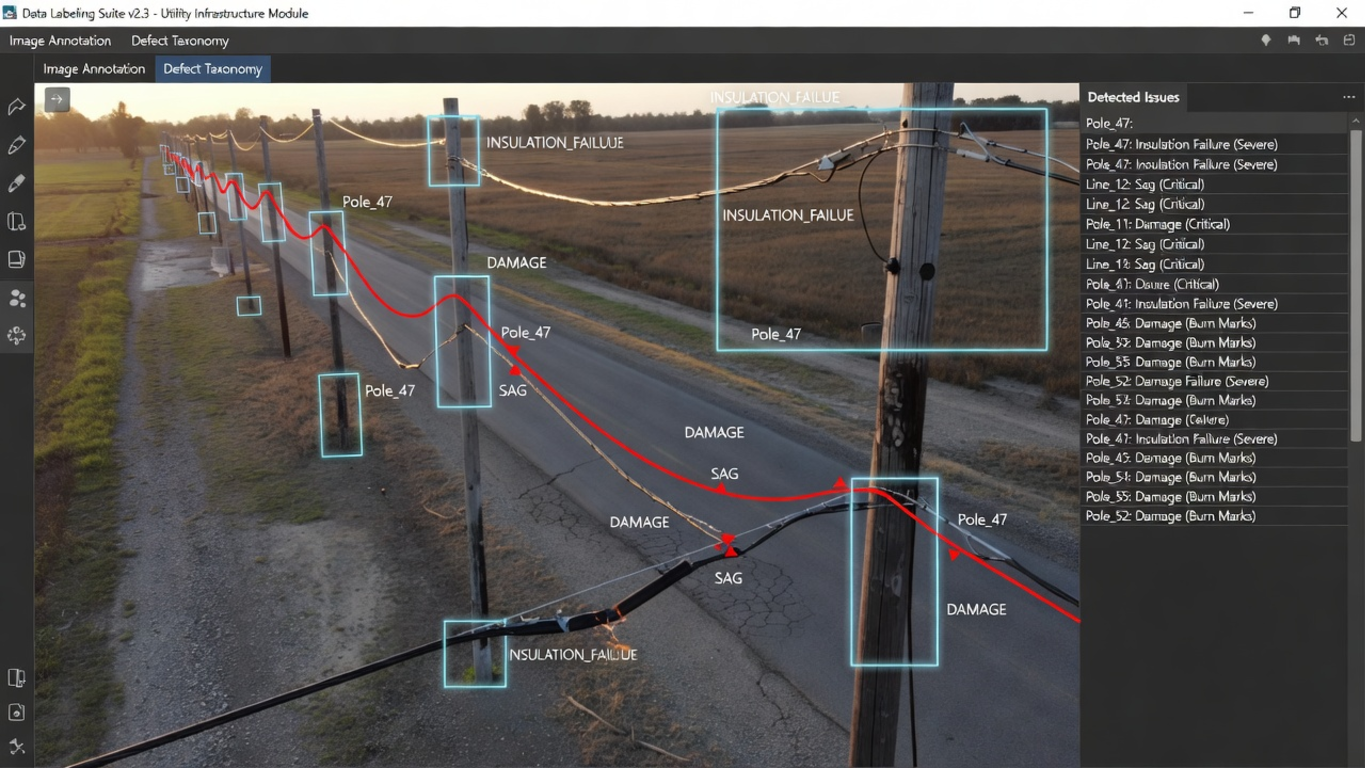
Labels, versioned like code.
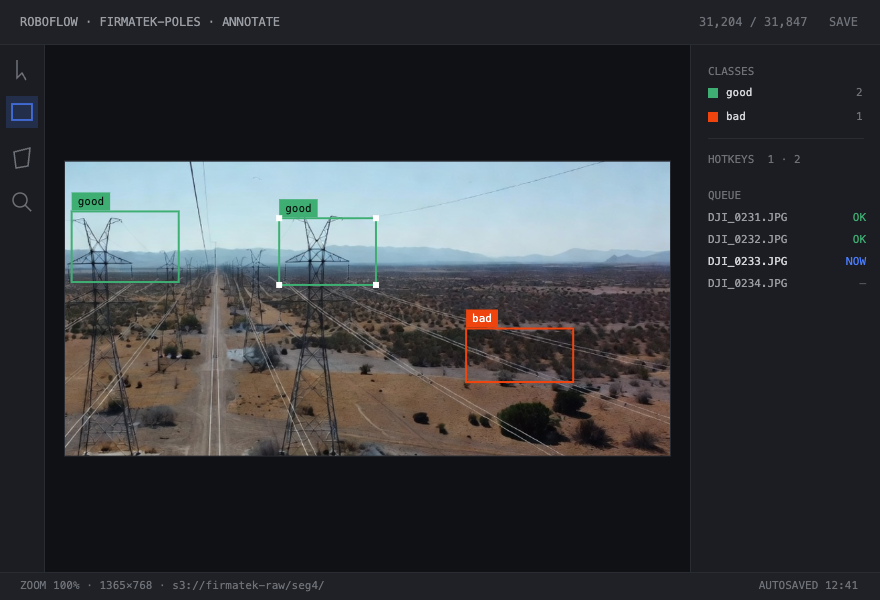
Drone imagery lands in S3 and goes through our in-house annotation pipeline — poles, lines, and insulators boxed by hand, defects graded against a shared taxonomy, every release QA'd before a model sees it. This is the software the labeling team works in:


Only gated models ship.
 ANNOTATE
ANNOTATE
Drone imagery lands in S3 and is annotated in Roboflow — bounding boxes, two classes: good / bad.
 COMPETE
COMPETE
Two architectures trained in parallel — RCNN vs YOLOv11, each with its own pipeline. Months of iterations and tuning. YOLOv11 won decisively.
 DEPLOY
DEPLOY
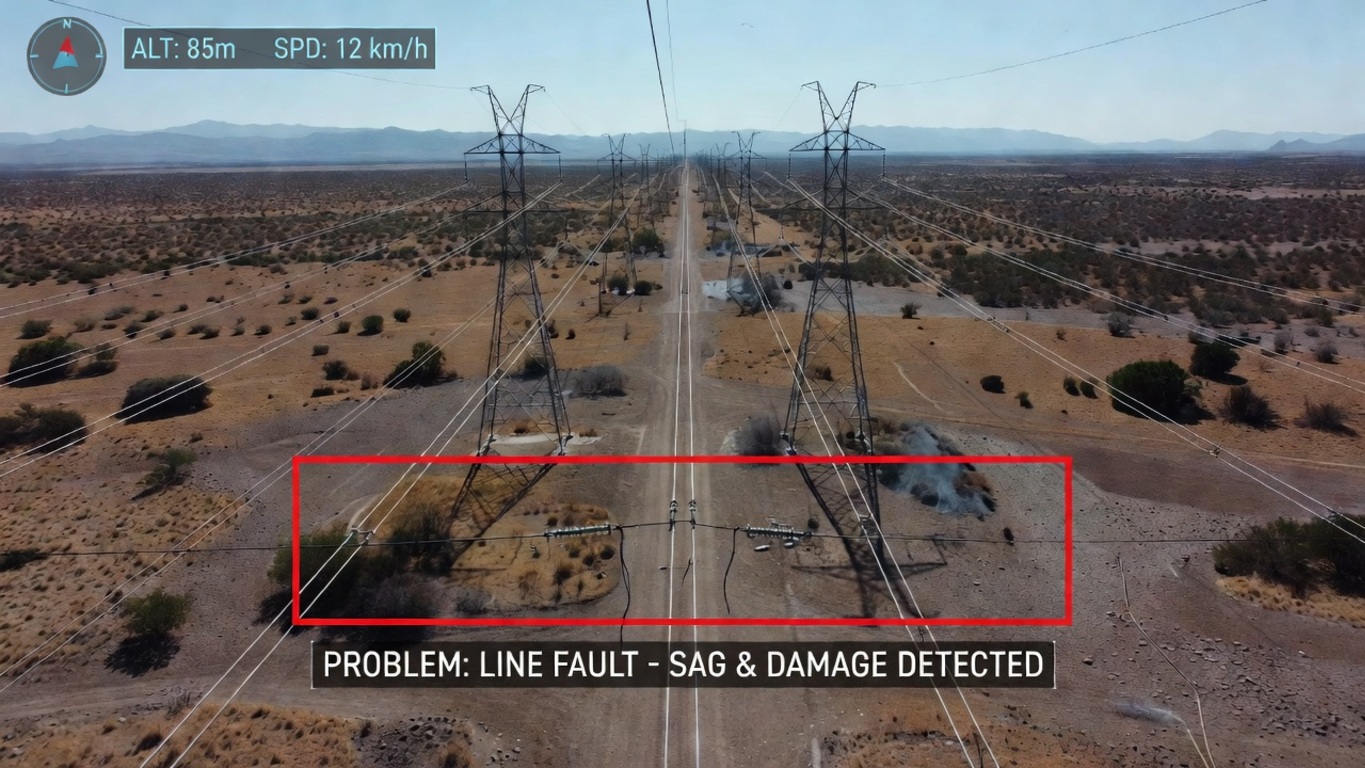
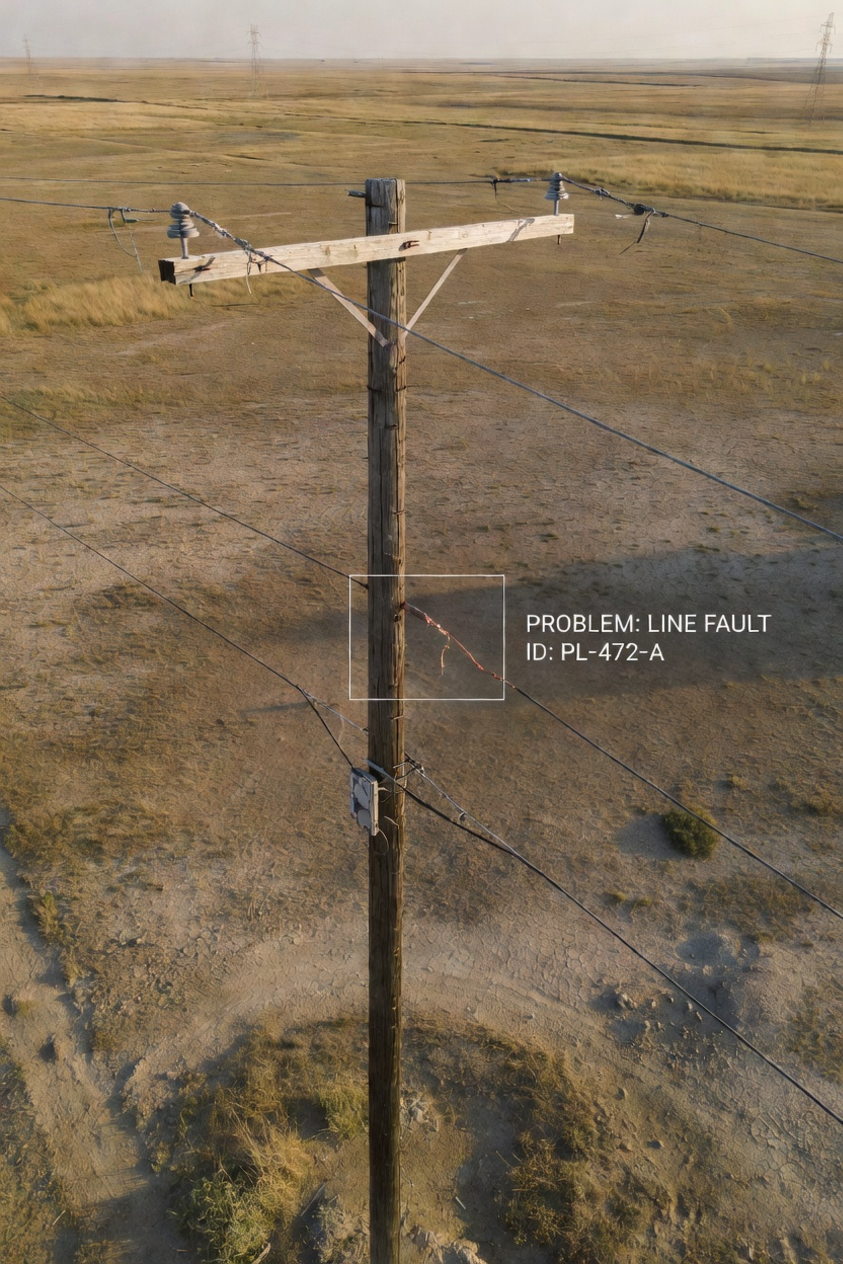
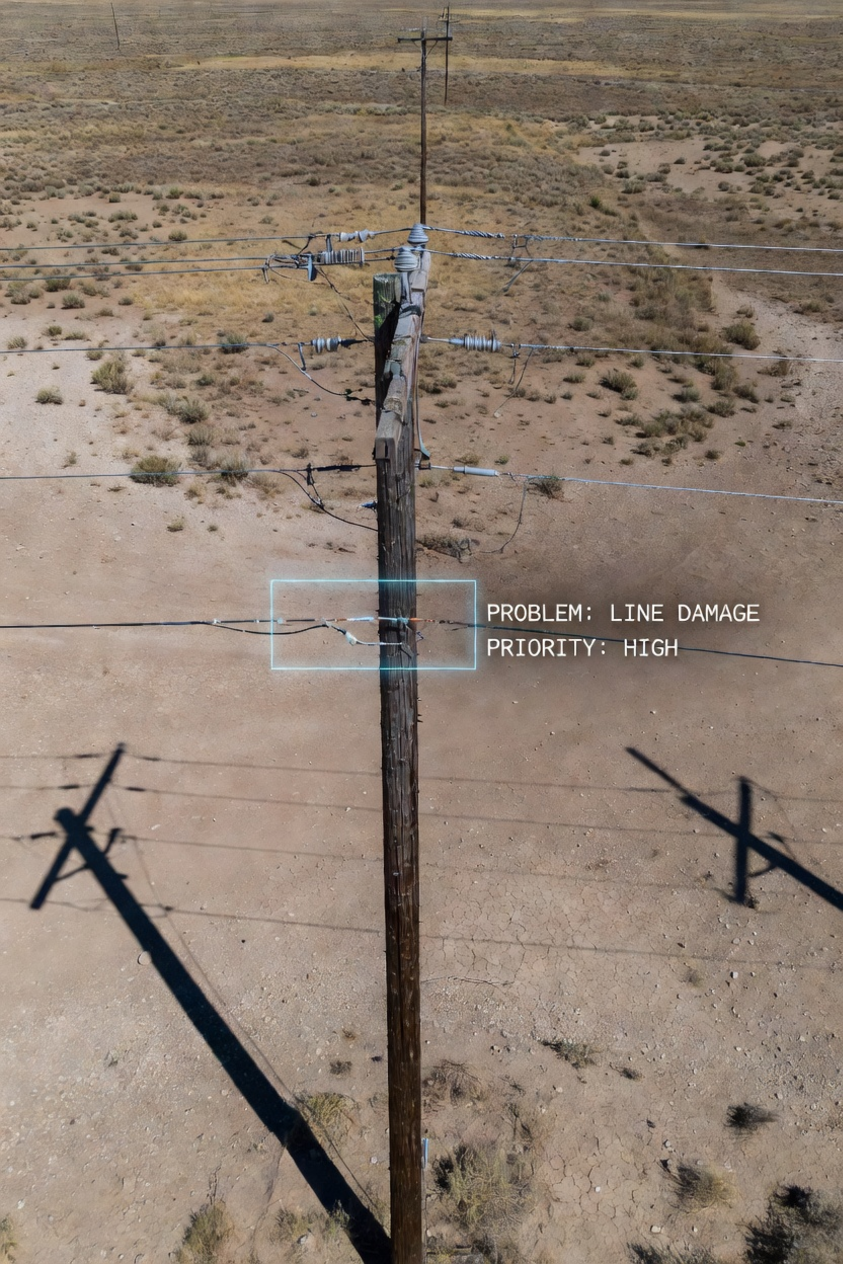
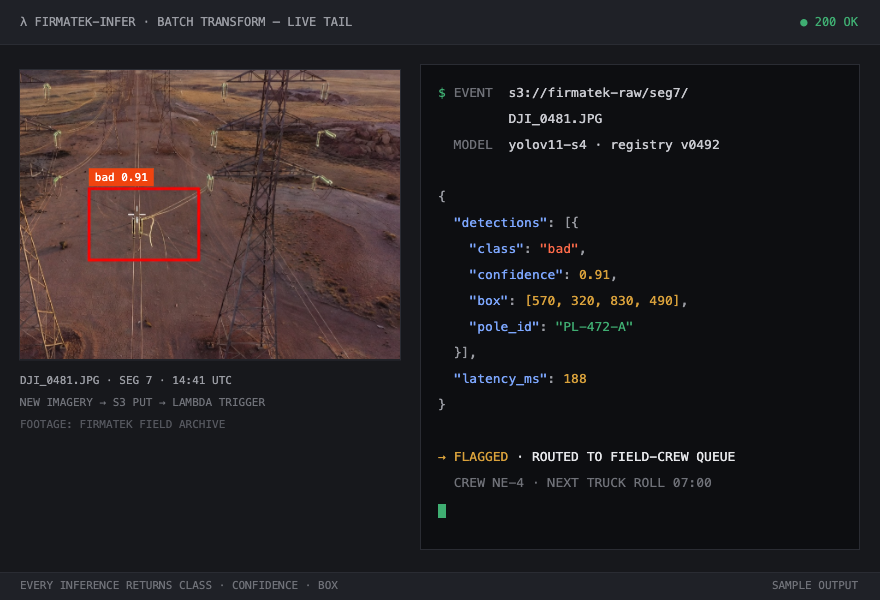
Lambda triggers batch transform on new imagery. Every inference returns class, confidence, and box — flagged poles route straight to field crews.
RCNN RETIRED AFTER PLATEAU
The truck rolls only when the model says so.
Crews used to review drone footage by hand for weeks. Now every flight is graded automatically, and flagged poles arrive as dispatch-ready cards — class, confidence, location.
Low-confidence detections still route to a human. That's the deal: the model does the looking, people make the close calls.
Thousands of poles. Inspected by truck, by ladder, by guess.
Firmatek needed to assess pole condition across enormous territories. Manual inspection is slow, costly, and inconsistent — and a missed bad pole is an outage, or worse. They needed a system accurate enough to dispatch real crews on its word.
Punch built the full loop: drone imagery in, graded poles out — every detection carrying a class, a confidence score, and a location a lineman can drive to.
 Case study PDF ↓IN THE NEWS
PIT & QUARRY · OCT 2021
Firmatek acquires Kespry — drone-based aerial intelligence. ↗
COMMERCIAL UAV NEWS · NOV 2021
Firmatek brings its mining expertise to the Kespry platform. ↗
FIRMATEK.COM · OCT 2021
Firmatek announces the acquisition of Kespry. ↗
Case study PDF ↓IN THE NEWS
PIT & QUARRY · OCT 2021
Firmatek acquires Kespry — drone-based aerial intelligence. ↗
COMMERCIAL UAV NEWS · NOV 2021
Firmatek brings its mining expertise to the Kespry platform. ↗
FIRMATEK.COM · OCT 2021
Firmatek announces the acquisition of Kespry. ↗